
Cavity Shell: Sequential Cast-in-Place Method with Ultra-Thin Additively Manufactured Formwork for Compression-Only Structures
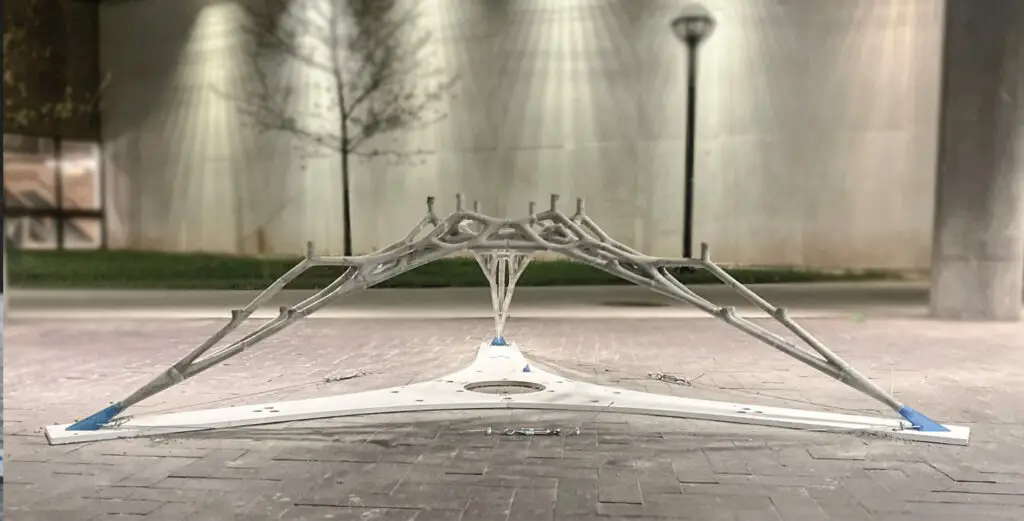
This research presents an alternative approach to constructing compression-only structures by introducing an innovative in-situ construction approach. This approach involves assembling lightweight 3D-printed plastic formworks into a compression-only configuration for the casting of concrete. To overcome the issue of hydrostatic pressure, instead of casting the entire structure at once, this research adopts sequentially casting concrete. This is achieved through developing: 1) a new construction method based on the assembly of lightweight 3D printed plastic formwork in compression-only form, which is then sequentially cast with concrete in place; 2) an integrative formwork system informed by structural and casting logics (i.e., flowability, the height of the casting point in relation to hydrostatic pressure, placement of formwork interface in alignment to internal forces in the structure; 3) a parametric model for translating force-form diagram to integrative formwork. To verify this research method, Cavity Shell, a 1:1 scale compression-only table leg structure measuring 1.4 meters in radius and 0.8 meters in height, was designed and built. This ultra-lightweight formwork took less than 48 hours to assemble and sequentially cast by two people. This research demonstrates the potential to rethink the construction of compression-only structures by minimizing the material used and improving economic and environmental efficiency in their construction life cycle.
Mantaray: Robotic 3D Printing Clay

This research aims to revolutionizes the process of fabricating free-form surfaces and investigate the bed usage in printing doubly curved clay panels. The development process of the printing bed involved two main systems that would coexist and work together flawlessly: (1) a printing surface; (2) a grid of linear actuators, which required a balance between it’s form and function. The printing surface of the bed is made of a composite material consisting of a honeycomb TPU grid that reinforces the silicon surface cast on it. With 49 independent linear actuators, the bed surface’s shape and curvature can be controlled with a very high precision. To ensure these systems work together seamlessly, the research developed a TPU connection system and actuator head connected through fiberglass wires. The printing bed developed for doubly-curved surface in the research eliminates the limitations of vertical printing, allowing to create lighter and thinner panels with openings and was successfully verified by producing only 1mm thick doubly curved panels with extreme curvature.
Shell Wall: Coupling Non-Planar Robotic 3D Concrete Printing & Topology Optimization

Shell Wall demonstrator is the first lightweight, structurally reinforced freeform concrete wall ever 3D printed. This innovative wall system features a geometry optimized to support its load case, with material distributed in a hierarchical grid of curved ribs ranging in diameter from 65 to 150 millimeters. The non-load-bearing areas between these ribs are just 6.5 to 8 centimeters deep, enabling the sandwiching of insulation between two concrete shells that are only 2.5 millimeters thick. The fields of concrete between the ribs are domed to increase stability and minimize material usage. Shell Wall weighs only 160 kilograms – a 72% reduction in weight compared to a conventional, solid concrete wall of equivalent size. This research develops non-planar 3DCP for the production of topology-optimized building parts, which entails features such as multiple tubular branching with varying diameters, interconnection between tubular and ultra-thin surface geometry, sharp overhangs. The project focuses on the 3D printing of lightweight concrete walls as this is the commonly used element in the current 3DCP but with no emphasis on material reduction. Materially and structurally optimized wall’s where load points are local rather than distributed all along the length will reduce the concrete consumption, improve the overall structural performance, lower the weight of the building, and ultimately reduce the building’s embodied carbon footprint. Additionally, according to the demand of industry and expediting real-world application, the research is set to eliminate the use of accelerators which can increase the potential of cracking and reduce the strength of the material. Firstly, a geometrically informed non-planar toolpath method based on the geometry of the design has been developed. Geometrically Informed Non-Planar toolpath (GINP-toolpath) is a curved or spiral path for the printing head to follow rather than straight lines. Secondly, a geometrically informed variable material deposition method (GIV-material deposition) has been employed to regulate the amount of material dispensed during the printing process in reference to the nonplanar toolpath. GIV-material deposition refers to a technique that will regulate the amount of material being deposited along the toolpath based on the shape of the parts being printed and the relativity of the GINP-toolpath.